Comecei a querer entender como funciona a comunicação entre o controle remoto e o aparelho principal. Li o básico e achava que sabia como funcionava. Como passo seguinte, tentei detectar o código enviado pelo controle remoto do “Sky”, da Philips. Sei que é o RC5. Sei criar um código de comunicação, implementar um controle remoto e fazer a detecção. O problema é que eu queria usar um desses controles já prontos. “Aí quebrei a cara”.
De início já começam os problemas. No datasheet do receptor Infravermelho (IV) 3709, que tem na TV Panasonic, os pinos estão indicados errados. Visto de frente para a lente, com os pinos para baixo, e da esquerda para a direita, consta no datasheet saída, Vcc (central) e terra. Só funcionou quando troquei o Vcc com o terra. (Renie, um técnico, meu colega, separou este receptor IV para mim. O seu fica em “stand by” até o próximo encontro. Hehe!).
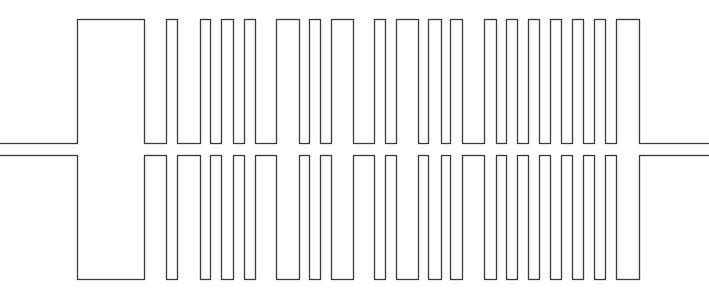
Acionei a tecla “1” do controle e obtive a seguinte figura. O nível normal, antes do código é '1'.

Desta figura, juntamente com o link http://www.sixca.com/eng/articles/remote/ pode-se concluir o seguinte:
1 – O período total é de: Número de bits x período do bit = 14 x 1,67ms = 23,38ms. Eu medi 22,75ms. Vejam na minha figura. Acontece que na figura 4 do link, ele considera a origem do trem de pulsos em menos meio ciclo de clock, o que dá 1,67ms / 2 = 0,835ms. Se somarmos o período encontrado por mim, com este meio período, tem-se: 22,75 + 0,835 = 23,585ms; quase idêntico ao que a teoria informa. Este item está ok!
2 - O período ‘0’ do primeiro start bit tem que estar entre 0,8ms e 1,02ms. Caso contrário é considerado erro.
“When the detect subroutine is called, it first waits for a start bit. The length of the low part of the first start bit is measured. If the low pulse of first start bit is longer than 1.020 ms or less then 800 uS the routine returns indicating error or no command received.”
Na foto, o primeiro mível ‘0’ tem cerca de 2,7ms. Começa aí o problema!!!!
No link http://home1.stofanet.dk/hvaba/fprc5rx/index.html aparece o formato do código RC5 e o da Sony.
Se compararmos o meu sinal com o da Sony, pode-se pensar que o meu sinal está invertido. Pelo menos neste caso os dois stars bits coincidem. O problema é que o controle é da Philips e não da Sony.
3 – Marquei, em vermelho, os períodos de um bit (1,67ms), o mais apuradamente que eu pude. Em amarelo marquei as verticais que unem os níveis altos com os baixos do sinal. Já tentei decodificar o sinal, mas nada coincide. Nem as transições e nem o número de pulsos.
Ha! O controle remoto funciona no receptor da Sky!!!
Se alguém puder ajudar a descobrir como este código funciona, seria uma boa.
Abraços.
MOR_AL