Navegação baseada no magnetismo terrestre
Caros colegas.
Estou fazendo um sistema de monitoração e controle de diversos parâmetros de uma embarcação, apenas para o meu uso pessoal. Dentre eles se encontra o de monitorar e acionar um leme de acordo com uma determinada direção magnética. Por exemplo, navegar com uma rota de 30 graus magnéticos.
Realmente acredito que saiba fazer esta tarefa, porém, o problema é fazê-la de uma maneira que considere a relação custo/benefício. Acho que não adianta apenas saber fazer, tem que fazer com eficiência e simplicidade.
Baseada nesta diretiva, pesquisei na internet sensores a efeito Hall, mas a sensibilidade que achei era bem pequena. Teria que amplificar um sinal contínuo de, no máximo, cerca de 50 micro volts. Este nível de sinal requer um bom amplificador operacional, e além disso, um circuito com ajuste automático de zero para compensar o nível de offset e outros detalhes. O meu sistema está crescendo assustadoramente, tive que migrar do 16F628 para o 16F877 e já estou utilizando todos os pinos disponíveis.
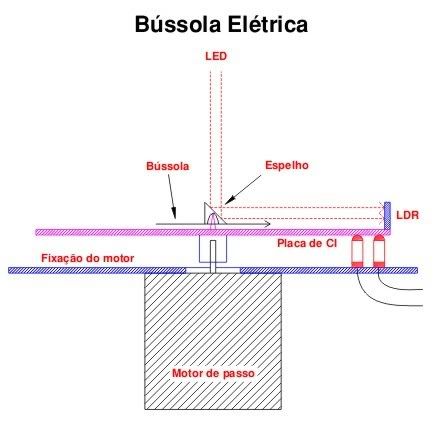
Pensei em algo mais sensível, como aplicar um campo magnético em uma bússola, de modo a ter uma corrente de bobina (na realidade são duas) como função da direção da embarcação. Apesar desta solução ser sensível, esbarrei com problemas mecânicos, pois teria que saber (eletricamente) quando a bússola apontasse para uma determinada direção. Outro problema é que esta função segue uma relação de tangente do ângulo, o que provoca grandes erros para ângulos superiores a 60 graus.
Finalmente minha questão é a seguinte:
Alguém teria alguma informação para que eu pudesse pesquisar mais sobre o assunto?
Grato.
MOR_AL
Estou fazendo um sistema de monitoração e controle de diversos parâmetros de uma embarcação, apenas para o meu uso pessoal. Dentre eles se encontra o de monitorar e acionar um leme de acordo com uma determinada direção magnética. Por exemplo, navegar com uma rota de 30 graus magnéticos.
Realmente acredito que saiba fazer esta tarefa, porém, o problema é fazê-la de uma maneira que considere a relação custo/benefício. Acho que não adianta apenas saber fazer, tem que fazer com eficiência e simplicidade.
Baseada nesta diretiva, pesquisei na internet sensores a efeito Hall, mas a sensibilidade que achei era bem pequena. Teria que amplificar um sinal contínuo de, no máximo, cerca de 50 micro volts. Este nível de sinal requer um bom amplificador operacional, e além disso, um circuito com ajuste automático de zero para compensar o nível de offset e outros detalhes. O meu sistema está crescendo assustadoramente, tive que migrar do 16F628 para o 16F877 e já estou utilizando todos os pinos disponíveis.
Pensei em algo mais sensível, como aplicar um campo magnético em uma bússola, de modo a ter uma corrente de bobina (na realidade são duas) como função da direção da embarcação. Apesar desta solução ser sensível, esbarrei com problemas mecânicos, pois teria que saber (eletricamente) quando a bússola apontasse para uma determinada direção. Outro problema é que esta função segue uma relação de tangente do ângulo, o que provoca grandes erros para ângulos superiores a 60 graus.
Finalmente minha questão é a seguinte:
Alguém teria alguma informação para que eu pudesse pesquisar mais sobre o assunto?
Grato.
MOR_AL